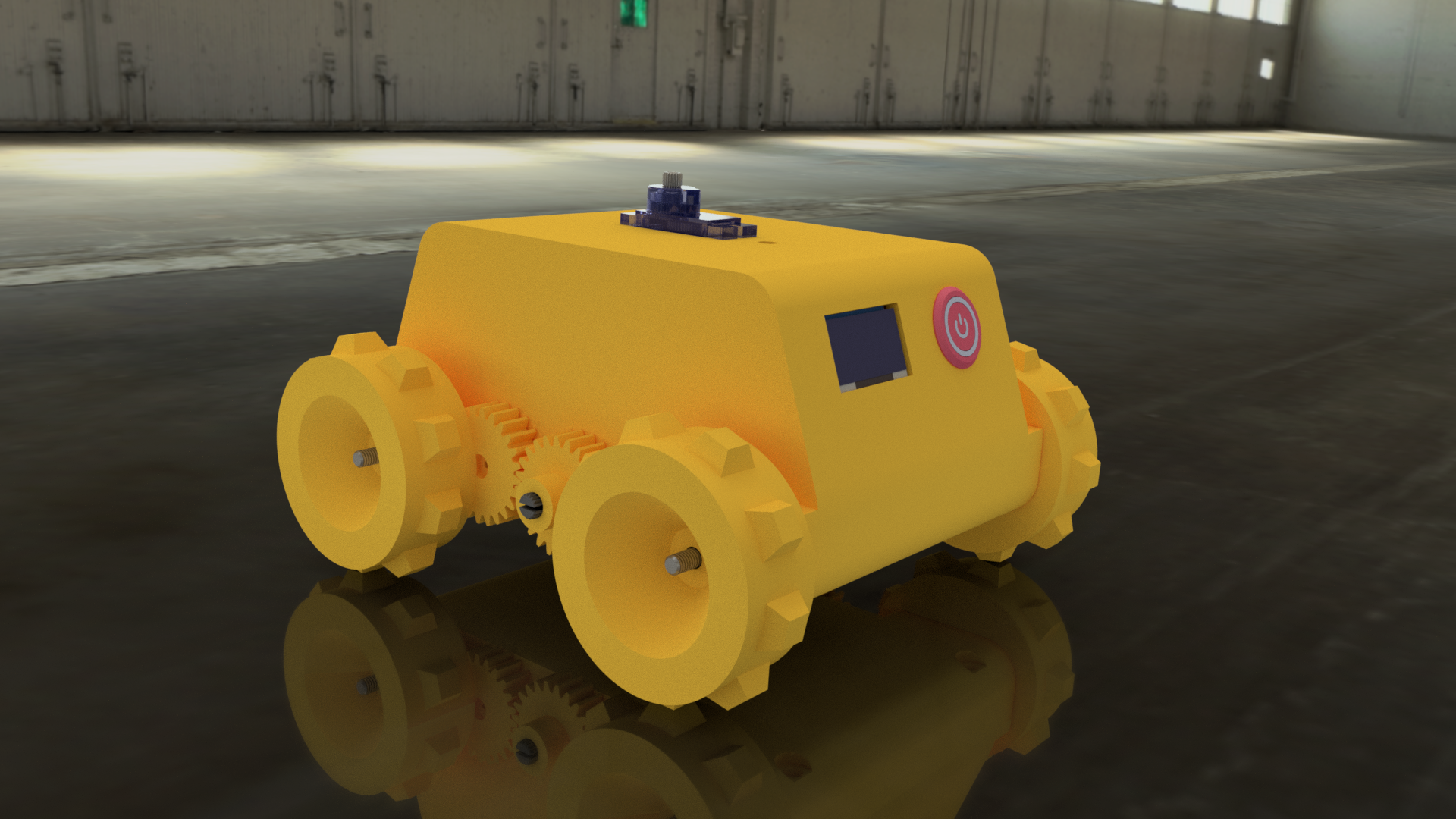
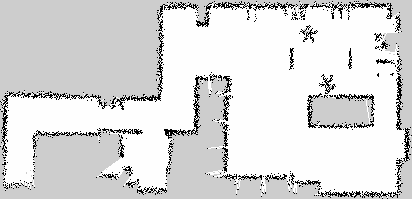
ScanBot is a fully 3D-printed robot equipped with caterpillar tracks capable of dynamically create map of its environment.

ScanBot’s ecosystem leverages ROS (Noetic) to gather and process scan data, odometry and to receive steering commands.

Low-level it uses a very simple interface which looks like this:
<COMMAND>:[PARAMETER1],[PARAMETER2],[...]#
Interface is asynchronous and returns data in the same format.
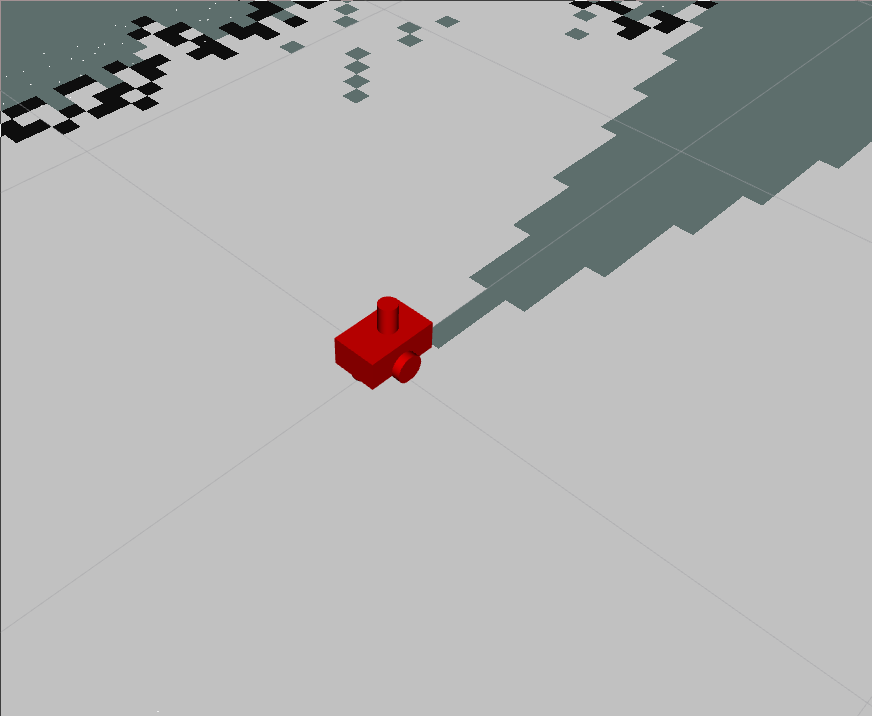
Whole system is dockerized. It is also equipped with a Gazebo simulation:
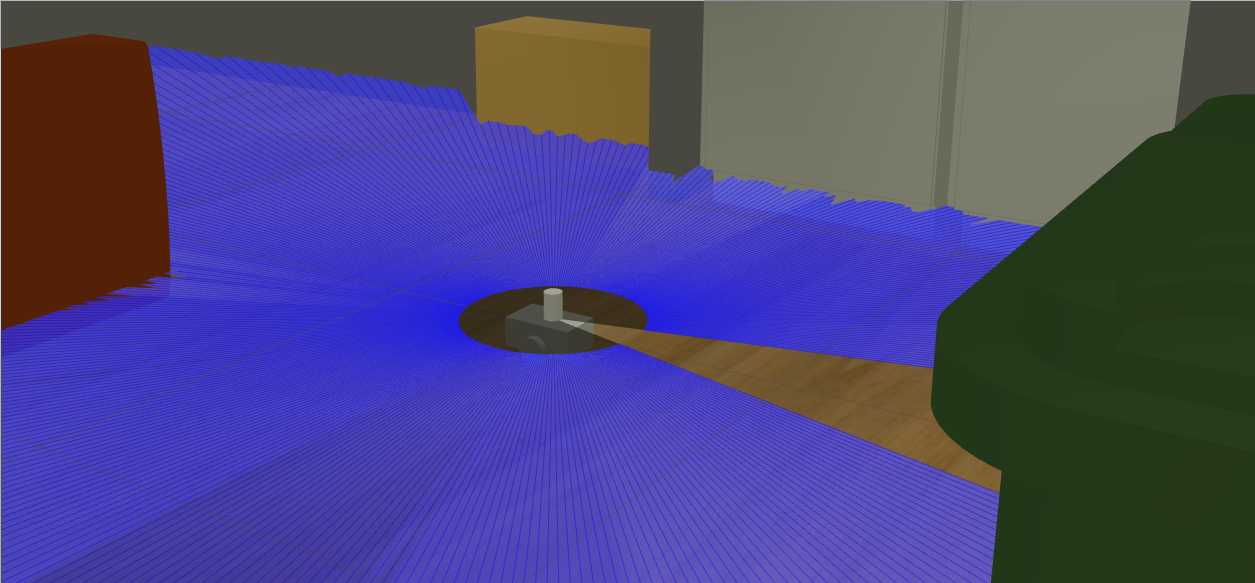
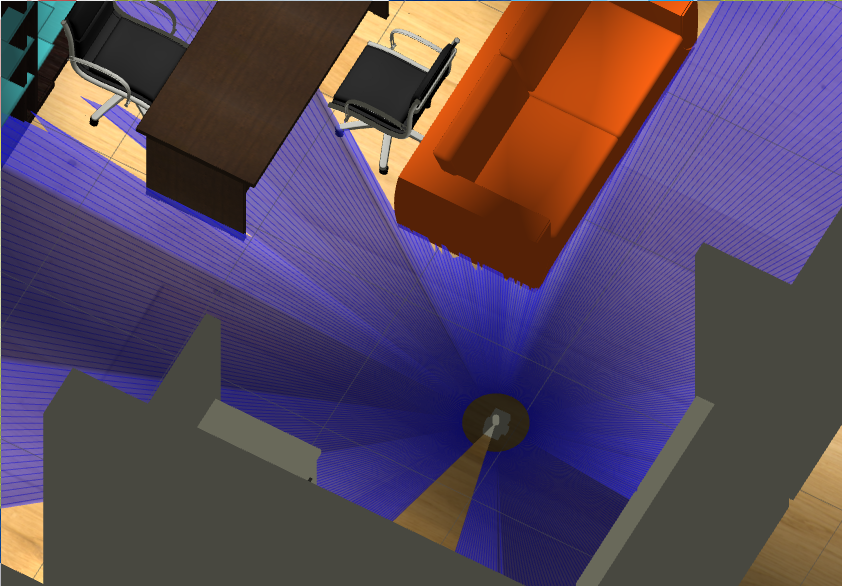
In both cases - simulation and physical robot - a gamepad is required to steer the robot.
You can also try it - just clone the repository and run start.sh gb from docker directory.
Code is available here.
Thanks for visiting :)
